8.1.5 アクチュエーター(サーボモーター)の使い方
- モーターを使用する場合はモータードライバーを経由して制御します。
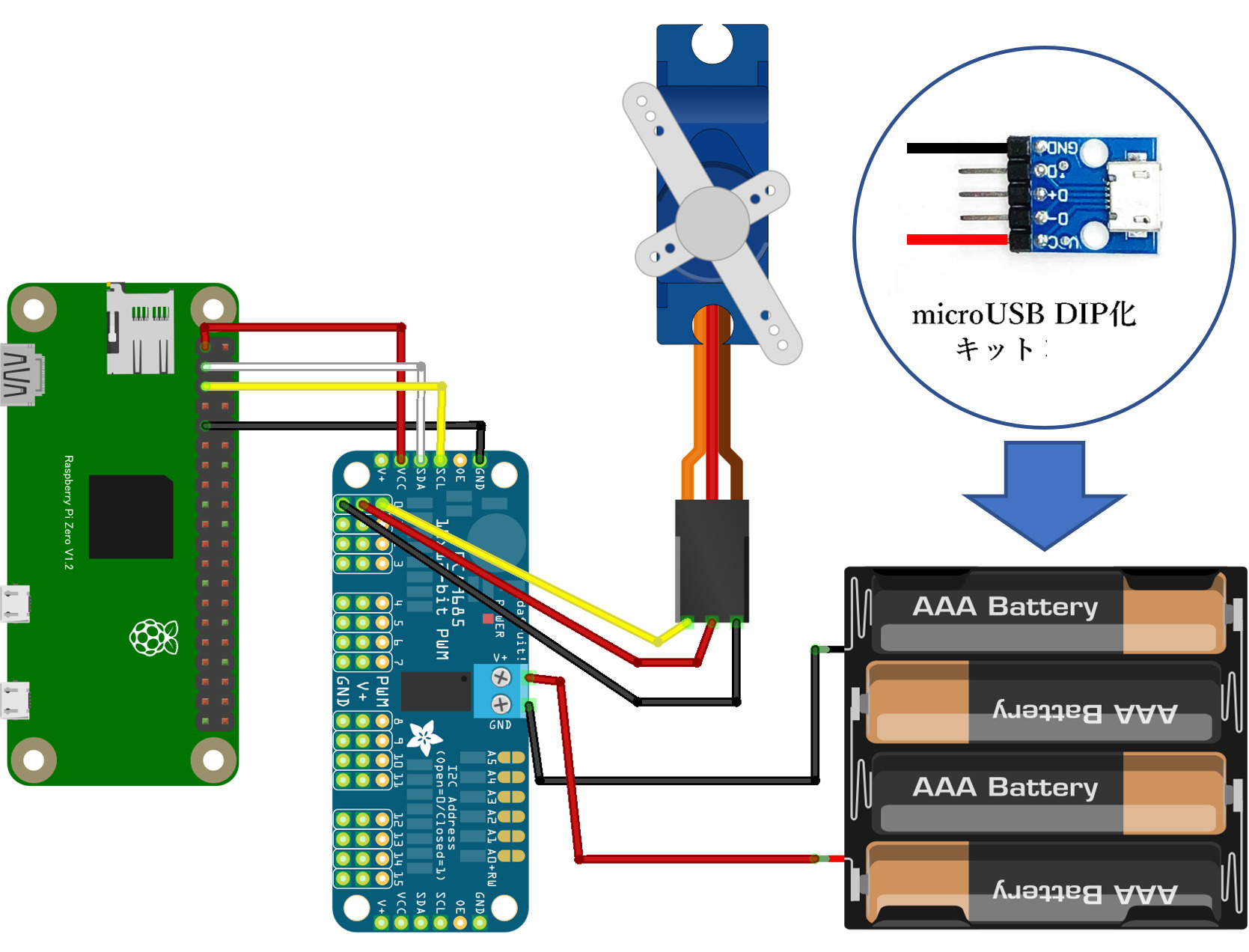
- モーターを動かすため外部から電力を取る必要があります。
回路図とプログラムサンプル
動作を確認するためのサンプルコードは CHIRIMENパネル から入手できます。
ブラウザでサンプルコードの中を確認したい場合は コードを確認する から確認出来ます。
- アクチュエーター(サーボモーター) > ID:pca9685 タイトル:サーボモータ
【備考】
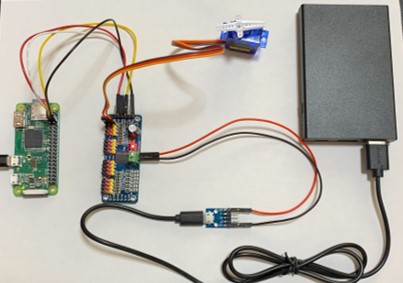
- 給電方法は電池ボックス又は USB DIP 化キットを使ったモバイルバッテリーの使用、電源モジュールを使った ACアダプタ給電などを使用します。
- サーボドライバーの給電接続には精密ドライバーを使用します
モバイルバッテリーの利用方法
- microUSB DIP化キットを使用してモバイルバッテリーを電池ボックスとして使用する事が出来ます。
- 電源として利用するだけであれば、VIN と GND の 2ヶ所にジャンパーワイヤーを使用して接続が出来ます。
PiZero から給電する回路図
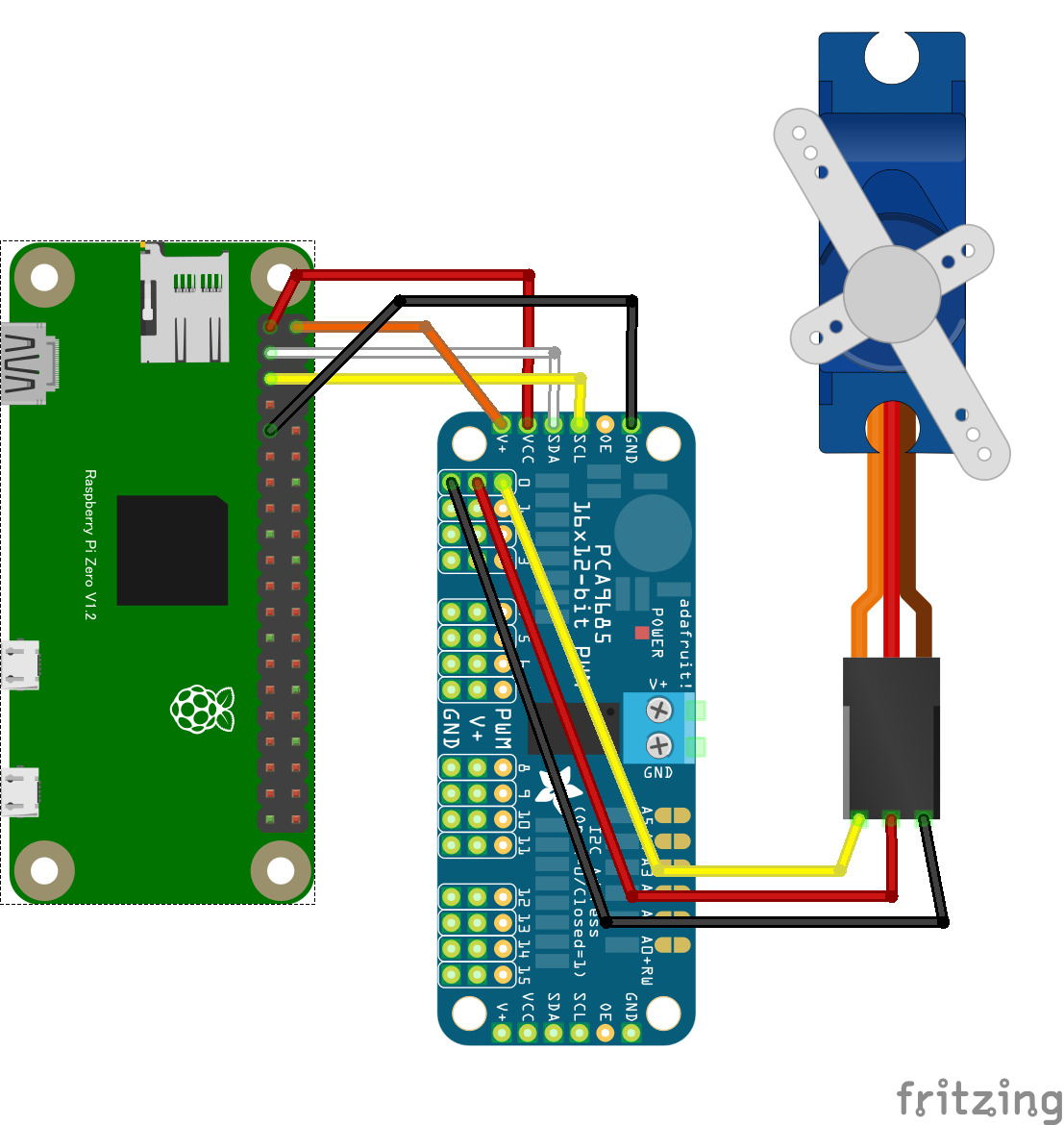
- 低消費電力のモーター(例:SG-90)1個の場合、RasPi Zero からの電力供給でも動作させられるものもあります。